Search results
In engineering, deflection is the degree to which a structural element is displaced under a load.
The elastic deflection of a weightless cantilever
... more
Euler–Bernoulli beam theory (also known as engineer’s beam theory or classical beam theory) is a simplification of the linear theory of elasticity ... more
barycentre; from the Greek βαρύ-ς heavy + κέντρ-ον centre) is the center of mass of two or more bodies that are orbiting each other, or the point around ... more
Column or pillar in architecture and structural engineering is a structural element that transmits, through compression, the weight of the structure above ... more
In physics, the gyromagnetic ratio (also sometimes known as the magnetogyric ratio in other disciplines) of a particle or system is the ratio of its ... more
In astrodynamics an orbit equation defines the path of orbiting body around central body relative to , without specifying position as a function of time. ... more
Torque, moment or moment of force , is the tendency of a force to rotate an object about an axis. The unbalanced torque on a body along axis of rotation ... more
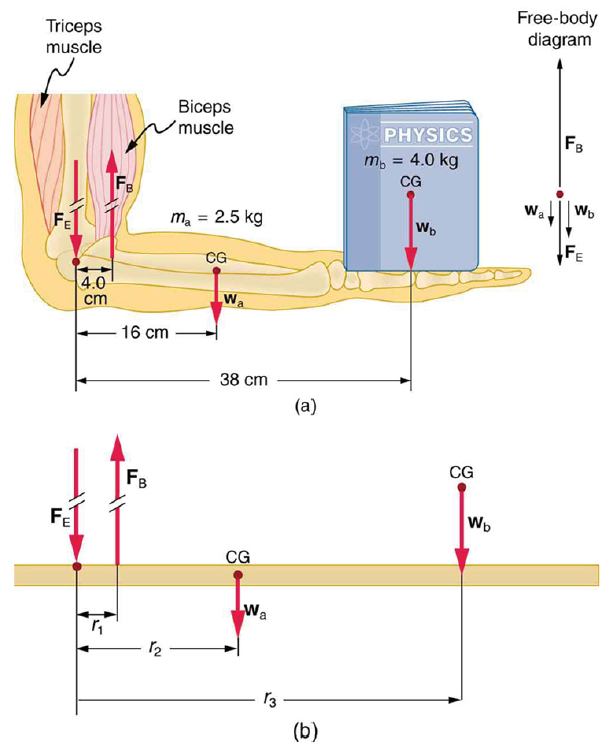
(a) The figure shows the forearm of a person holding a book. The biceps exert a force FB to support the weight of the forearm and the book. The triceps are assumed to be relaxed. (b) Here, you can view an approximately equivalent mechanical system with the pivot at the elbow joint
Strategy
There are four forces acting on the forearm and its load (the system of interest). The magnitude of the force of the biceps is FB, that of the elbow joint is FE, that of the weights of the forearm is wa , and its load is wb. Two of these are unknown FB, so that the first condition for equilibrium cannot by itself yield FB . But if we use the second condition and choose the pivot to be at the elbow, then the torque due to FE is zero, and the only unknown becomes FB .
Solution
The torques created by the weights are clockwise relative to the pivot, while the torque created by the biceps is counterclockwise; thus, the second condition for equilibrium (net τ = 0) becomes
Note that sin θ = 1 for all forces, since θ = 90º for all forces. This equation can easily be solved for FB in terms of known quantities,yielding. Entering the known values gives
which yields
Now, the combined weight of the arm and its load is known, so that the ratio of the force exerted by the biceps to the total weight is
Discussion
This means that the biceps muscle is exerting a force 7.38 times the weight supported.
Reference : OpenStax College,College Physics. OpenStax College. 21 June 2012.
http://openstaxcollege.org/textbooks/college-physics
Creative Commons License : http://creativecommons.org/licenses/by/3.0/
Stiffness is the rigidity of an object — the extent to which it resists deformation in response to an applied force. In general, stiffness is not the same ... more
...can't find what you're looking for?
Create a new formula
Calculate the force the biceps muscle must exert to hold the forearm and its load as shown in the figure below, and compare this force with the weight of the forearm plus its load. You may take the data in the figure to be accurate to three significant figures.